
Contents
You are at the right place if you are a beginner to the field of microcontrollers. In this tutorial you will learn How to Blink an LED using PIC Microcontroller. PIC is a family of microcontrollers manufactured by Microchip Technology Inc. PIC stands for Peripheral Interface Controller. It is also referred to as Programmable Interface Controller or Programmable Intelligent Computer.

MikroC and CCS C are the best compilers for beginners as they includes a lot of built in libraries which enable us to program a PIC Microcontroller without the deep knowledge of its internal architecture. I think CCS C is the best High Level Language Compiler for PIC Microcontroller as it is almost hardware independent.
For more information and for downloading CCS Compiler please visit their website.
In this tutorial we will learn how to write outputs to an IO pin. In the following section, I am going to explain the basics of PIC Microcontroller Input Output configurations. As we are using CCS C Compiler you may skip it but every PIC programmer should know it. In this experiment we are using PIC 16F877A microcontroller.
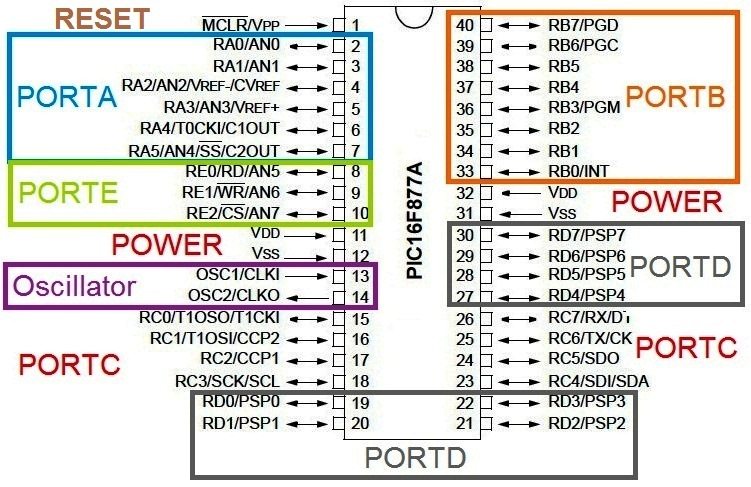
VDD and VSS are the pins for providing power. For PIC 16F877A, VDD = 5V and VSS = GND (0V). Pin 13 & 14, OSC1 and OSC2 are for connecting oscillator which will provide the necessary clock for the operation of microcontroller. The 1st pin MCLR is the reset pin of PIC Microcontroller, it is an active low input. It should be connected to HIGH (VDD) for normal operations. IO (Input Output) pins in a PIC Microcontroller is divided in to different ports, eg : PORTA, PORTB, PORTC, PORTD etc. Each PORT is associated with two registers, TRIS and PORT which are named as TRISA, PORTA, TRISB, PORTB etc.
TRIS and PORT Registers in PIC Microcontroller
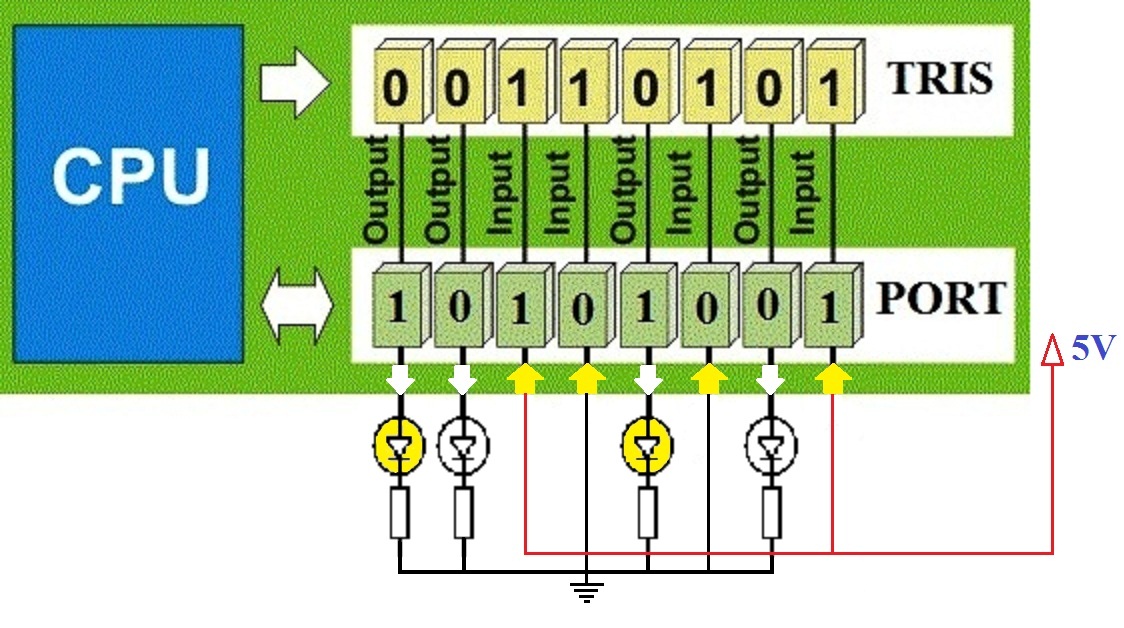
PORT and TRIS are the registers which handle discrete IO operations in PIC Microcontroller. TRIS stands for Tri-state. TRIS register determines the function of an IO pin. Logic 1 at TRIS register makes the corresponding pin Input while Logic 0 at TRIS register makes the corresponding pin Output. PORT register can be used to read input pins or to write status of output pins. For an Output Pin, Logic 1 at PORT register makes the corresponding pin HIGH state (VDD) while Logic 0 at PORT register makes the corresponding pin LOW state (VSS). Reading PORT register reads the actual voltage levels on IO pins. If the actual voltage level is near to HIGH Level (VDD), corresponding PORT bit will be 1 and if the voltage level is near to LOW Level (VSS), corresponding PORT bit will be 0. Hope that you can understand its working from the above image.
Prerequisite Knowledge
You should know the basics of C Programming for developing projects in CCS C Compiler. Following are some C concepts that may help you.
- A number with a prefix ‘0b’ indicates a binary number.
- A number with a prefix ‘0’ indicates an octal number.
- A number with a prefix ‘0x’ indicates a hexadecimal number.
- A number without prefix is a decimal number.
Let’s see some examples…
| Decimal | Binary | Octal | Hexadecimal |
|---|---|---|---|
| 0 | 0b00000000 | 00 | 0x00 |
| 1 | 0b00000001 | 01 | 0x01 |
| 128 | 0b10000000 | 0200 | 0x80 |
| 255 | 0b11111111 | 0377 | 0xFF |
CCS C Discrete IO Functions
get_tris_x()
This function is used to read TRIS register. Examples are given below.
tris_a = get_tris_A(); //Reads TRISA register tris_b = get_tris_B(); //Reads TRISB register
set_tris_x()
This function is used to write TRIS register. Examples are given below.
set_tris_b(0xFF); //All pins of PORTB as Input set_tris_c(0x00); //All pins of PORTC as Output
input_x()
This function is used to read data from an IO port, ie it returns the value of a PORT register. This function sets direction of all pins of the specified port as INPUT (TRIS bits 1) before reading the input. Examples are given below.
a = input_a(); //Reads PORTA b = input_b(); //Reads PORTB c = input_c(); //Reads PORTC
output_x()
This function is used to write data to a PORT. This function sets direction of all pins of specified port as OUTPUT (TRIS bits 0) before writing the output. Examples are given below.
output_b(0xFF); //All pins of PORTB HIGH (VDD) output_c(0x00); //All pins of PORTC LOW (VSS)
input()
This function returns the state of the specified pin. This function sets the direction of the specified pin as INPUT (TRIS bit 1) before reading the input. Examples are given below.
while(!input(PIN_B0)); //Waits for Pin B0 to goes HIGH if(input(PIN_C0)) //Pin C0 is HIGH Now
output_bit()
This function writes the specified value (1 or 0) to the specified IO pin. This function sets the direction of the IO pin to OUTPUT before writing the value.
output_bit(PIN_B0, 1); //Makes the pin B0 logic HIGH (VDD) output_bit(PIN_B7, 0); //Makes the pin B7 logic LOW (VSS)
input_state()
This function reads the state of a pin without changing the direction of that pin as input() does.
b0 = input_state(PIN_B0); //Reads the state of B0 without changing its direction c0 = input_state(PIN_C0); //Reads the state of C0 without changing its direction
input_change_x()
This function reads the value of the specified port and it compares with the result of last time input_change_x() function was called. It returns an 8 bit or a 16 bit number representing the changes on the port. A 1 corresponds if the value has changed and 0 corresponds if the value has unchanged.
portc_check = input_change_c();
output_float()
This function sets the specified pin to input mode (TRIS bit 1), which is in high impedance state.
output_float(PIN_B3); //Makes pin B3 Input output_float(PIN_C5); //Makes pin C5 Input
output_drive()
This function sets the specified pin to output mode (TRIS bit 0).
output_drive(PIN_B6); //Makes pin B6 output output_drive(PIN_C3); //Makes pin C3 output
output_high()
This function sets the specified pin to HIGH state (VDD).
output_high(PIN_A0); //Makes pin A0 HIGH output_high(PIN_E0); //Makes pin E0 HIGH
output_low()
This function sets the specified pin to LOW state (VSS).
output_low(PIN_A2); //Makes pin A2 LOW output_low(PIN_E1); //Makes pin E1 LOW
output_toggle()
This function toggles the HIGH/LOW state of the specified pin.
output_toggle(PIN_B1); //Toggles the state of PIN B1 output_toggle(PIN_B2); //Toggles the state of PIN B2
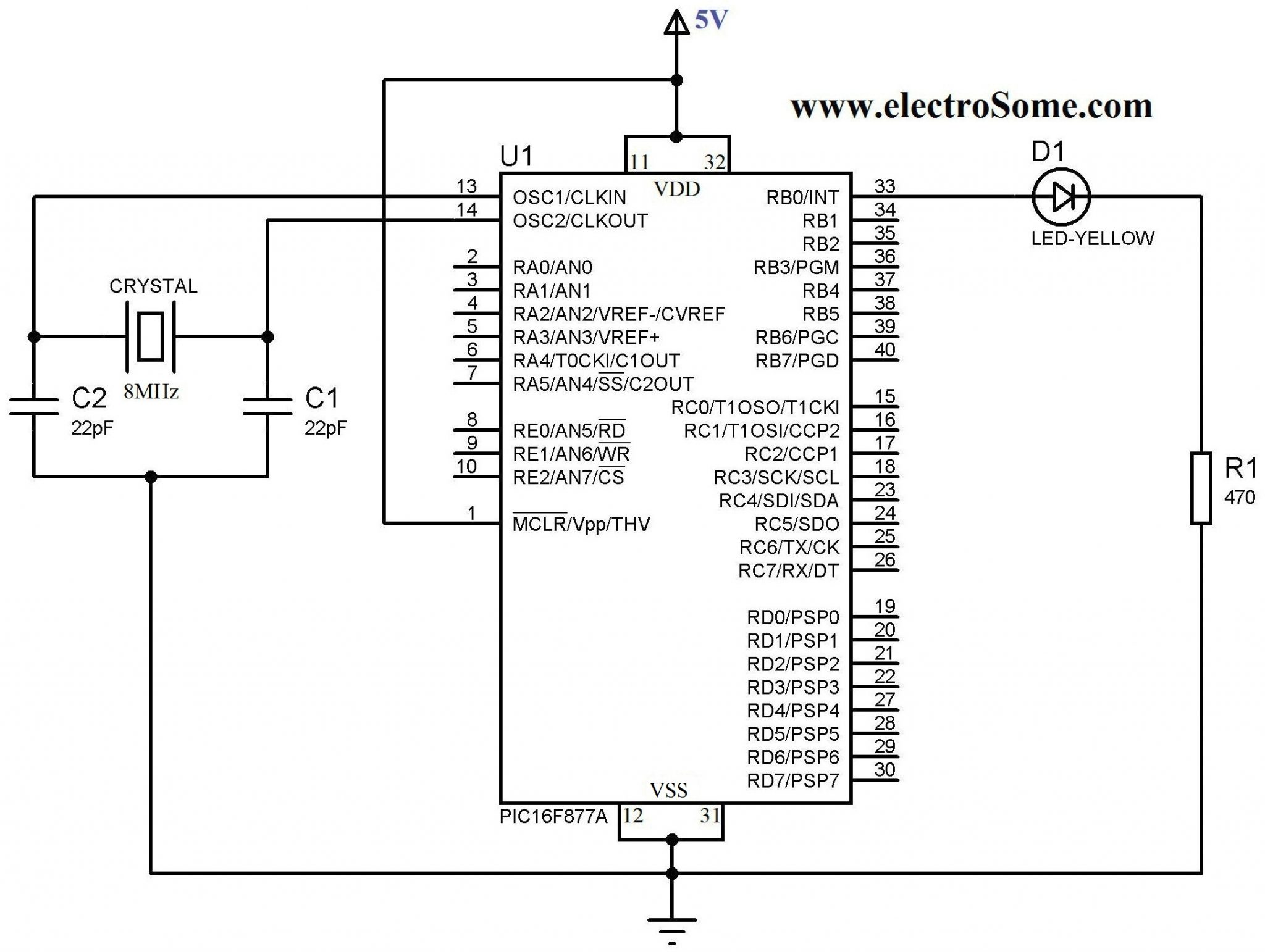
Circuit Diagram – LED Blinking
CCS C – Starting a New Project
Hope you download CCS C compiler from CCS Website and installed it.
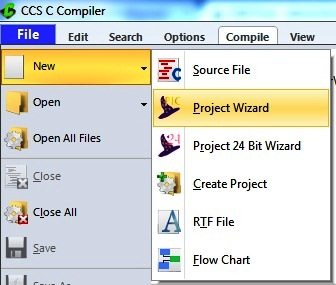
- Open the CCS C Software
- File >> New >> Project Wizard
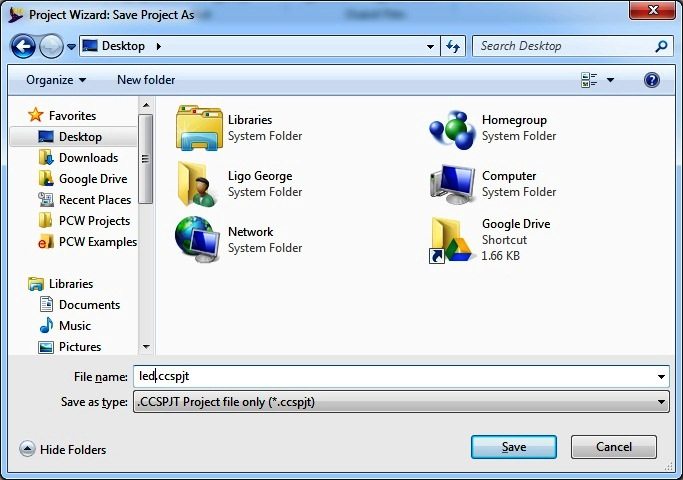
- Name the Project
- Select the device and Set Clock frequency
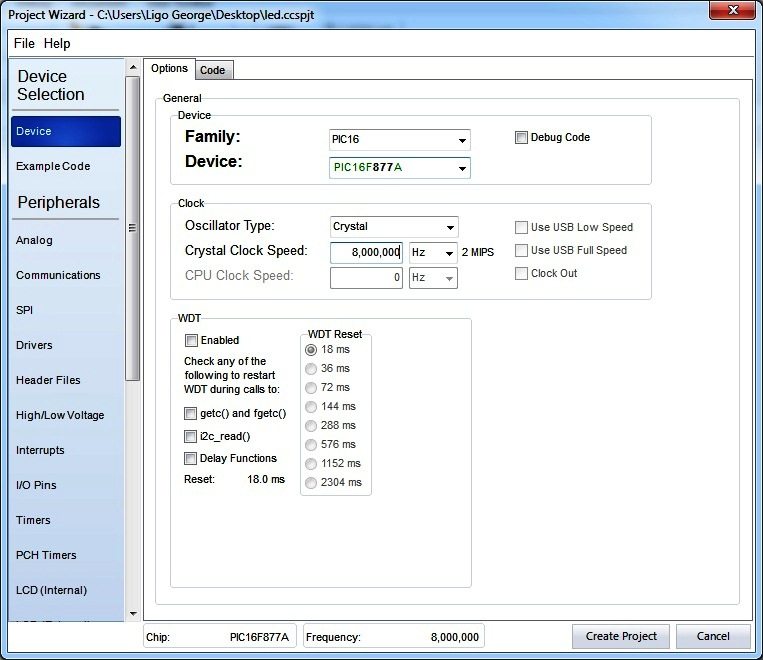
- Click on Create Project
- The New Project Wizard is completed, now you can see code editor.
- Enter the Code
CCS C Code – LED Blinking
#include <main.h>
#use delay (clock=8000000)
void main()
{
while(TRUE)
{
output_high(PIN_B0); //LED ON
delay_ms(1000); //1 Second Delay
output_low(PIN_B0); //LED OFF
delay_ms(1000); //1 Second Delay
}
}
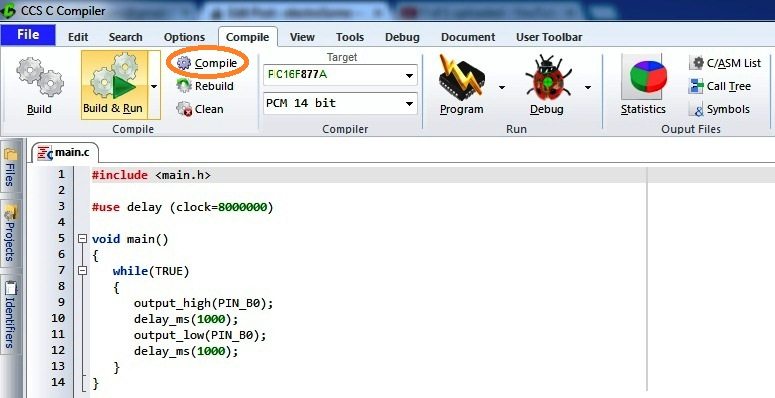
- Then click on Compile
- This will generate, hex file in your project folder. This is the file that to be burned to PIC Microcontroller. You can also simulate its working in Proteus ISIS.
Download Here
You can download the entire project files here.