Contents
In some of the electronics projects you may want to control a DC Motor with 8051 microcontroller. The maximum current that can be sourced or sunk from a 8051 microcontroller is 15 mA at 5v. But a DC Motor need currents very much more than that and it need voltages 6v, 12v, 24v etc, depending upon the type of motor used. Another problem is that the back emf produced by the motor may affect the proper functioning of the microcontroller. Due to these reasons we can’t connect a DC Motor directly to a microcontroller.
To overcome these problems you may use a H-Bridge using transistors. Freewheeling diodes or Clamp diodes should be used to avoid problems due to back emf. Thus it requires transistors, diodes and resistors, which may make our circuit bulky and difficult to assembly.
To overcome this problem the L293D driver IC is used. It is a Quadruple Half H-Bridge driver and it solves the problem completely. You needn’t connect any transistors, resistors or diodes. We can easily control the switching of L293D using a microcontroller. There are two IC’s in this category L293D and L293. L239D can provide a maximum current of 600mA from 4.5V to 36V while L293 can provide up to 1A under the same input conditions. All inputs of these ICs are TTL compatible and clamp diodes is provided with all outputs. They are used with inductive loads such as relays solenoids, motors etc.
L293D contains four Half H Bridge drivers and are enabled in pairs. EN1 is used to enable pair 1 (IN1-OUT1, IN2-OUT2) and EN2 is used to enable pair 2 (IN3-OUT3, IN4-OUT4). We can drive two DC Motors using one L293D, but here we are using only one. You can connect second DC Motor to driver pair 2 according to your needs.
Circuit Diagram
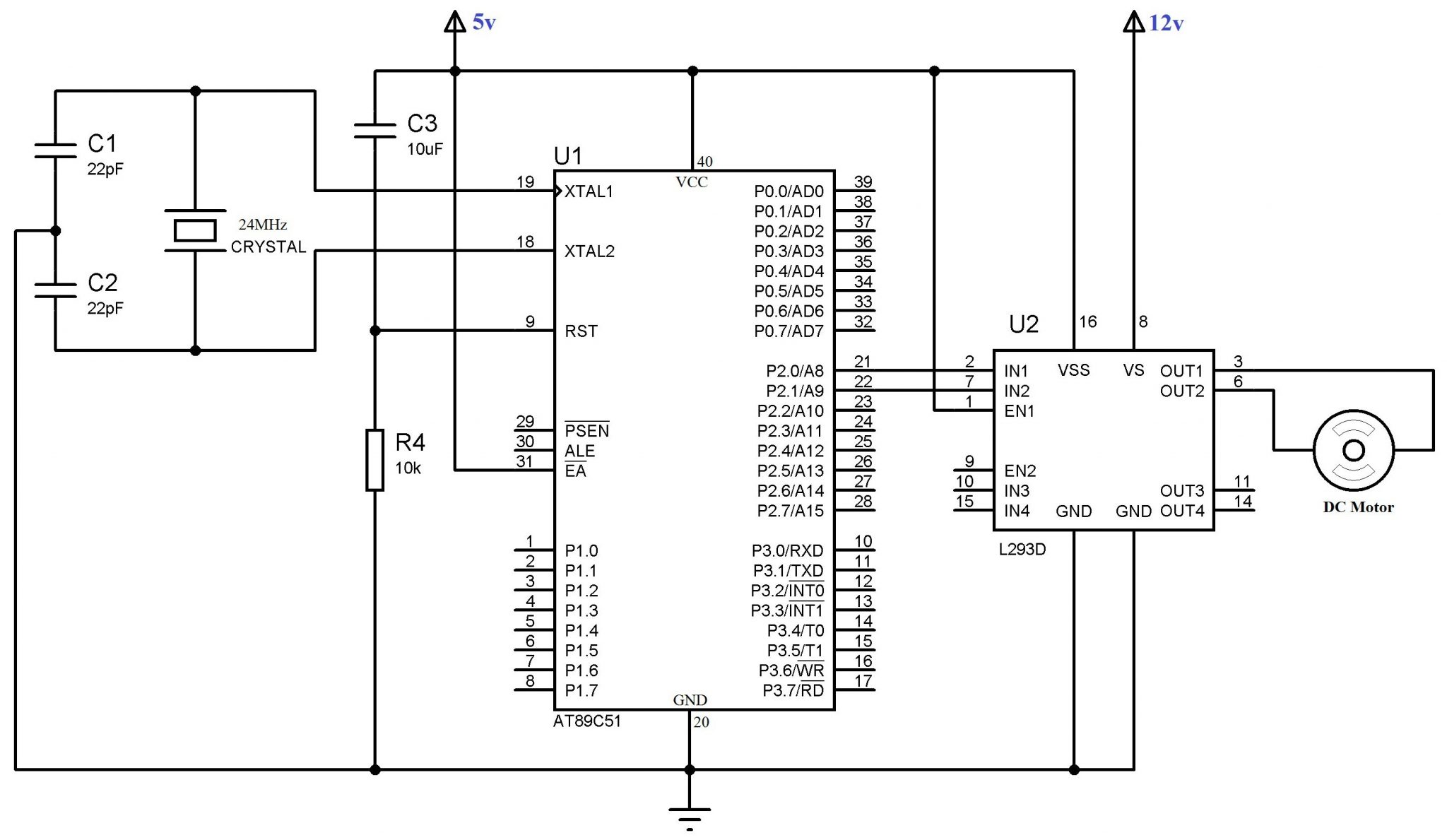
The DC Motor is connected to the first pair of drivers and it is enabled by connecting EN1 to logic HIGH (5V). VSS pin is used to provide logic voltage to L293D. Here 8051 microcontroller, which works at 5v is used to control L293D, hence the logic voltage is 5. The motor supply is given to Vs pin of the L293D.
Keil C Program
#include<reg52.h>
#include<stdio.h>
void delay(void);
sbit motor_pin_1 = P2^0;
sbit motor_pin_2 = P2^1;
void main()
{
do
{
motor_pin_1 = 1;
motor_pin_2 = 0; //Rotates Motor Anit Clockwise
delay();
motor_pin_1 = 1;
motor_pin_2 = 1; //Stops Motor
delay();
motor_pin_1 = 0;
motor_pin_2 = 1; //Rotates Motor Clockwise
delay();
motor_pin_1 = 0;
motor_pin_2 = 0; //Stops Motor
delay();
}while(1);
}
void delay()
{
int i,j;
for(i=0;i<1000;i++)
{
for(j=0;j<1000;j++)
{
}
}
}
Control Signals and Motor Status
| P2.0/IN1 | P2.1/IN2 | Motor Status |
|---|---|---|
| LOW | LOW | Stops |
| LOW | HIGH | Clockwise |
| HIGH | LOW | Anti-Clockwise |
| HIGH | HIGH | Stops |
You can download Keil C files and Proteus files here…