

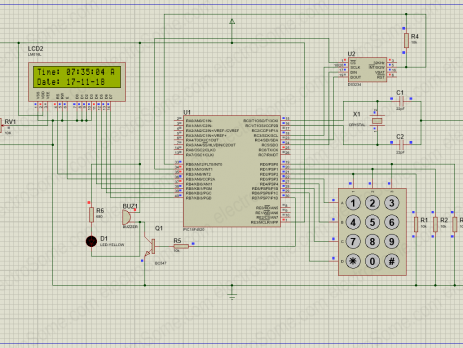
Digital Alarm Clock using PIC Microcontroller and DS3234 RTC
Here is a digital alarm clock made using PIC 18F4520 Microcontroller and DS3234 RTC (Real Time Clock). This project is for educational purposes or can be used as a reference for integrating DS3234 RTC. DS3234 is a very accurate RTC IC with integrated on chip temperature compensated crystal oscillator. It can be integrated with a microcontroller using SPI bus. This project is developed using MPLAB XC8 compiler. Components Required PIC 18F4520 MicrocontrollerDS3234 RTC20MHz Crystal 4x3 Keypad16x2 LCD10KΩ preset5V buzzerLEDBC547 TransistorCapacitor...
{kind=link}
{kind=link}
{kind=link}