

Interfacing Servo Motor with PIC Microcontroller – MPLAB XC8
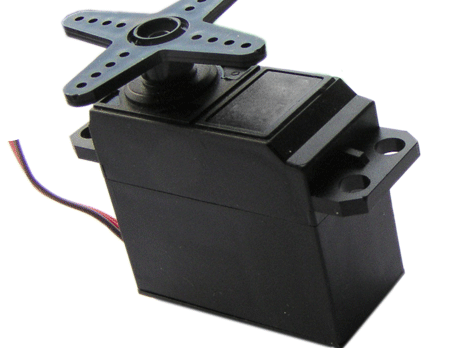
Servo Motor Servo Motor is an ordinary geared dc motor equipped with closed loop servo mechanism which uses position feedback to control exact angular position of the rotor. These are commonly used in robotic arms, legs etc. Servo Motors do not rotate continuously, their rotation is limited to fixed angles. Usually these motors have rotation limit from 90º to 180° and some special have limits 360° or more. Servo Motors usually have three wires. RED and BLACK wires are used to...




{kind=link}
{kind=link}