

Generating PWM Using 555 Timer IC
Contents
In applications like Motor Speed Control, LED Brightness Control we may want to vary voltage given to it. Most often we use a variable resistor for that. The main problem with this control is the power dissipation across the variable resistor. This problem can be avoided by using Pulse Width Modulation (PWM). In this method the average voltage delivered to the load is controlled by varying the duty cycle of the rectangular wave. Here I’m going to discuss one of the simple technique to generate PWM using the 555 Timer IC. The basic idea is to vary the input signal which is supplied to the control pin of the IC.
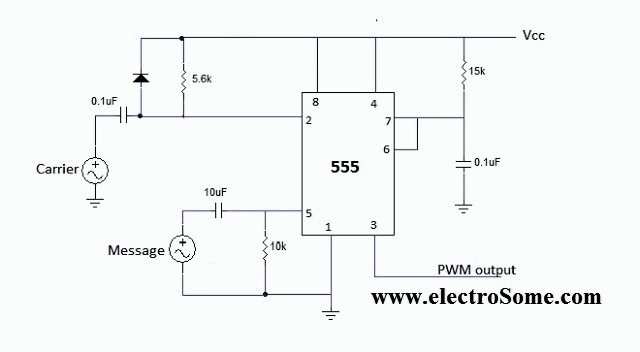
Circuit Diagram
Working
As you can see the 555 IC is wired in monostable mode of operation. Please read the article Monostable Multivibrator using 555 Timer for more details. In this mode the output is LOW (0V) when there is no triggering, when it is triggered via 2nd pin the output goes HIGH (Vcc) for some time. This time period is determined by the expression T=1. 11 RC ( R=R2 ; C=C2 in the diagram). Trigger is applied via a differentiator circuit to make sharp pulses. The resistor of differentiator is connected to Vcc to generate negative trigger pulses and the diode avoids positive spikes. And now this output is modulated using the input voltage applied at the control pin of the IC. So whenever the trigger pin pulses become low, the output of the IC switches to high and as a result the discharge transistor (internal to the 555 IC attached to the 7th pin) is disabled. So C2 charges through R2.This capacitor keeps on charging until the voltage is above the input control voltage, at which the IC changes its state. Now the output is low which makes the discharge transistor activated thereby discharging the capacitor C2. Hence the output pulse width is determined by the control voltage. This process continues and we get a continuous stream of pulses which can be used for motor control, driving LED’s, transmitting servo signals for remote control applications etc.
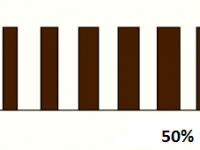
The output waveforms are shown below :

Design
I. Differentiator Circuit :
- RC << 0 .0016 T
T= Time period
Note: Make sure that the R value is 10 times greater than the resistance of signal generator to avoid loading effect.
II. Monostable Circuit
- T = 1. 11 R *C






{kind=link}
Either one should work.
What is the diode number 1N4007 or 1N4001?
Is the pwm output must be taken with respect to ground
Thanks. I’ll have to try this in a simulator